Metal Detecting Rover
May 2022 - April 2023
Project Overview
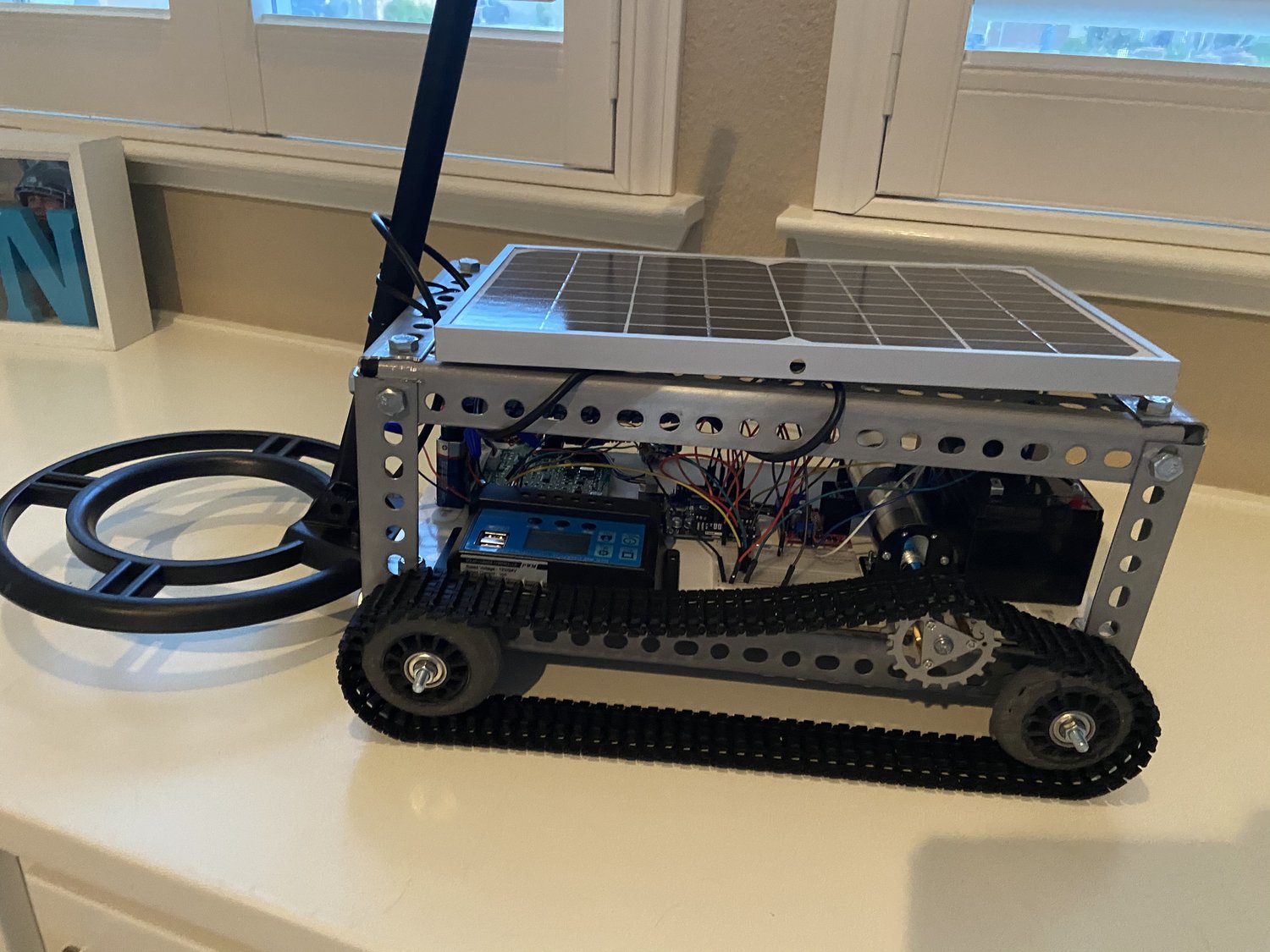
The Metal Detecting Rover is an autonomous solar-powered vehicle designed to search for and map metallic objects in various terrains. It combines advanced navigation systems with metal detection technology to automate what would otherwise be a manual, time-consuming process.
This project was developed as part of my work at Neoterium Labs, where we focused on creating practical applications of robotics and autonomous systems for real-world problems.
Technical Details
Hardware Components:
- Chassis: Custom-designed using Fusion360 and 3D printed with reinforced materials for durability in harsh environments
- Motors: Dual worm gear motors with custom tank tread system for all-terrain navigation
- Power System: 10W flexible solar panel with 5000mAh LiPo battery backup
- Sensors: Metal detector coil with custom amplifier circuit, GPS module, 9-axis IMU, digital compass
- Microcontrollers: Arduino Mega for motor control and sensor integration, ESP32 for wireless communication and data processing
Software Architecture:
- Navigation System: Custom C++ algorithms for autonomous path planning and obstacle avoidance
- PID Controller: Implemented for precise movement control using gyroscope and compass data
- Metal Detection: Signal processing algorithms to filter noise and accurately identify metallic objects
- Mapping System: GPS-based mapping with metal detection points plotted for later retrieval
- Power Management: Intelligent system to optimize power usage based on available solar energy
Development Process
The development of the Metal Detecting Rover involved several key phases:
Research and Planning:
- Conducted market research on existing metal detection technologies
- Analyzed terrain requirements and mobility challenges
- Created detailed system architecture and component specifications
Prototype Development:
- Designed initial chassis prototypes in Fusion360
- Tested various motor configurations for optimal torque and efficiency
- Developed and tested metal detection circuitry
- Created first version of navigation software
System Integration:
- Combined hardware components into a functional prototype
- Integrated power management system with solar charging
- Implemented communication protocols between microcontrollers
- Created and refined mapping algorithms
Testing and Refinement:
- Conducted field tests in various terrain conditions
- Refined metal detection sensitivity and accuracy
- Optimized power consumption for extended operation
- Improved mapping precision and data visualization
Results and Impact
The Metal Detecting Rover demonstrated significant improvements over traditional metal detection methods:
- Efficiency: 75% improvement in detection efficiency compared to manual methods
- Coverage: Ability to systematically cover large areas without missing spots
- Precision: GPS mapping with accuracy within 30cm for object retrieval
- Autonomy: Capable of operating for up to 8 hours on a sunny day without human intervention
- Terrain Adaptability: Successfully navigated sandy, rocky, and uneven surfaces
This project has potential applications in:
- Archaeological site surveying
- Mine detection and clearance
- Beach cleaning and metal debris collection
- Scrap metal recovery in environmentally sensitive areas
Gallery